RobotIIkE
Ce projet devait être réalisé en binôme. Je me suis occupé de la représentation graphique, mon collaborateur s’occupant des équations. Voici la liste des contrôles dans la fenêtre du robot:
- Haut/Bas -> Avancer/Reculer
- Gauche/Droite -> Pas chassé à gauche/droite
- PgUp/PgDown -> Aller vers le haut/vers le bas
- Clic gauche + déplacer souris -> Bouger la tête
- F4 : Afficher les axes du robot
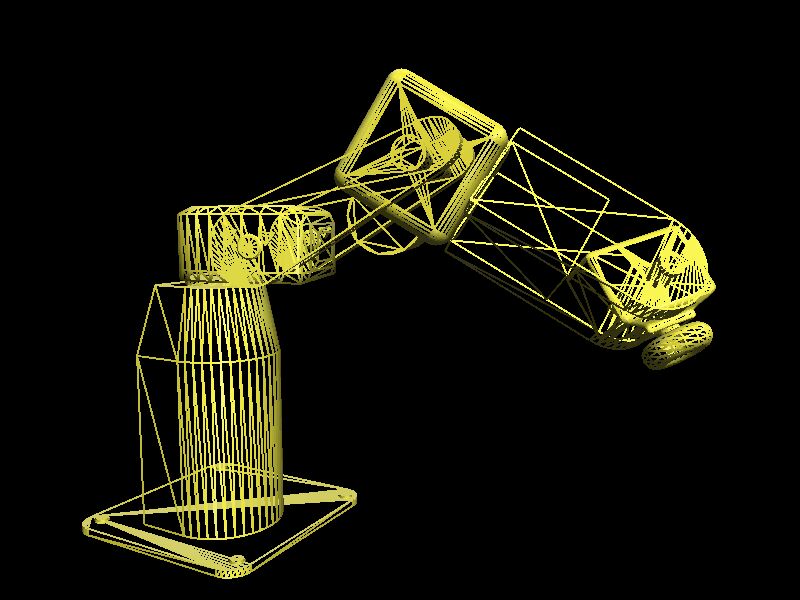
- F5 : Fil de fer
- F6 : Screenshot
- F9 : Reflet On/Off
- F10: Décor On/Off
- F11: Ombre On/Off
Description
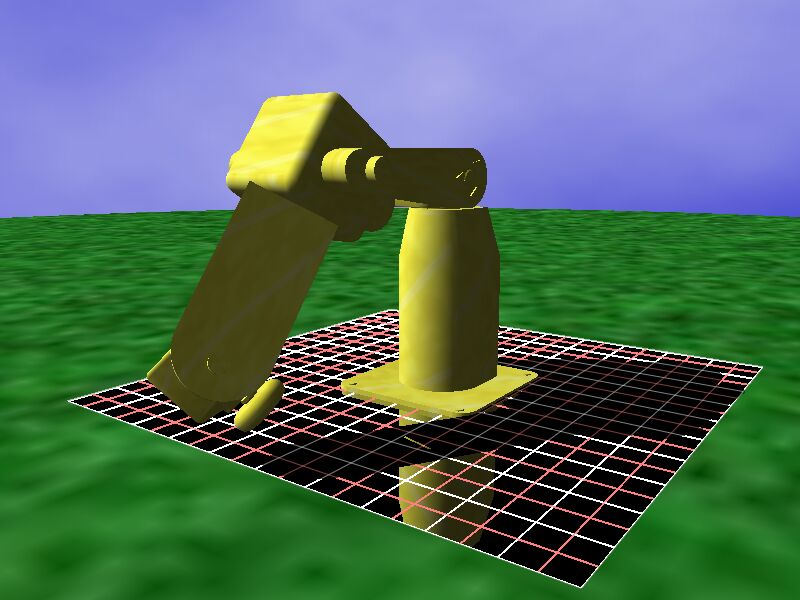
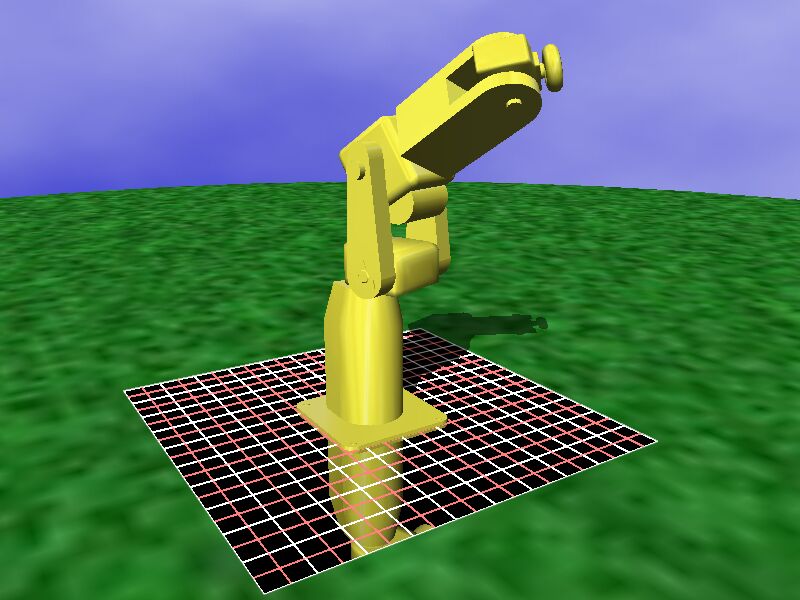
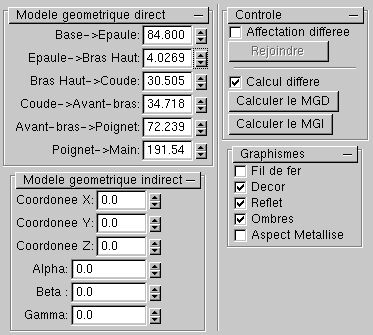
Mon projet d’option robotique en école d’ingénieur. Il s’agissait de modéliser le robot FANUC LrMate. Le robot peux se mouvoir et se rendre à un point donné.
License
Freeware
Platforms
Windows
Features
- Le moteur utilisé pour la représentation graphiquecomprends les choses suivantes:</li><li>Lecture de fichiers 3DSMax compilés (le compilateur est un programme à part)</li><li>Textures avec/sans éclairage</li><li>Ombres</li><li>Reflets</li><li>De nombreuses autres options permettent de contrôler l'aspect de la scène.Le projet a été réalisé en 2 semaines environ, durant lesquelles il a fallu, en plus de la modélisation du robot, créer les outils nécessaires à une représentationgraphique de qualité:</li><li>Compilateur 3DSMax (fichier .ASE)</li><li>Parser de fichiers de configuration</li><li>Framework OpenGL
Downloads
Release date
2007-04-27